
智能机器人技术
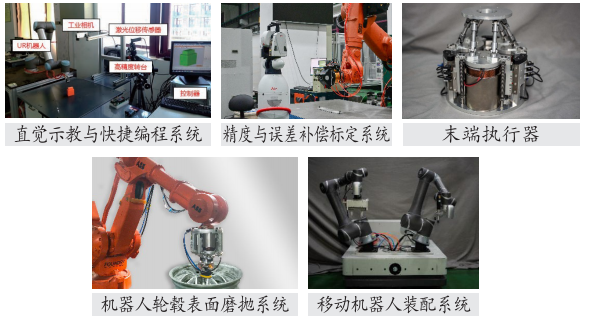
1、工业机器人运用技术
重点研究高精度工件视觉定位、机器人精度标定与误差补偿以及机器人力-运动混合控制等关键共性技术,研发直觉示教与快速编程系统、精度标定与误差补偿系统、机器人磨抛系统、协作机器人、机器人装配系统等工业机器人应用系统。
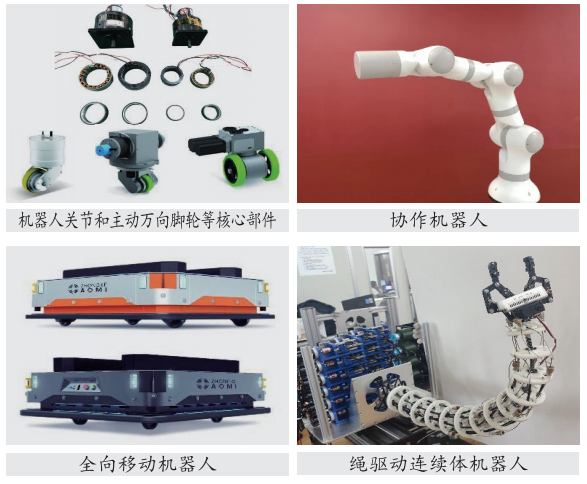
2、下一代工业机器人
重点研究工业机器人的驱动-传动-感知一体化设计、运动轨迹规划、柔顺运动控制、人机交互、定位导航等关键技术,研制机器人关键核心部件、协作机器人、全向移动机器人、连续体机器人等机器人系统。
1、工业机器人运用技术
重点研究高精度工件视觉定位、机器人精度标定与误差补偿以及机器人力-运动混合控制等关键共性技术,研发直觉示教与快速编程系统、精度标定与误差补偿系统、机器人磨抛系统、协作机器人、机器人装配系统等工业机器人应用系统。
2、下一代工业机器人
重点研究工业机器人的驱动-传动-感知一体化设计、运动轨迹规划、柔顺运动控制、人机交互、定位导航等关键技术,研制机器人关键核心部件、协作机器人、全向移动机器人、连续体机器人等机器人系统。
浙江工研院发展有限公司 地址:宁波高新科技开发区甬江大道2660号 宁波新材料创新中心东区A1
© 2022 Zhejiang Industrial Research Institute. All rights reserved. 浙ICP备2022022418号

微信公众号
联系电话
0574-87528202综合管理部
reinforce@zitri.cn微信公众号